步进电机是一种将电脉冲转化为角位移的设备。通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。您可以通过控制脉冲个来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
1. 材料清单
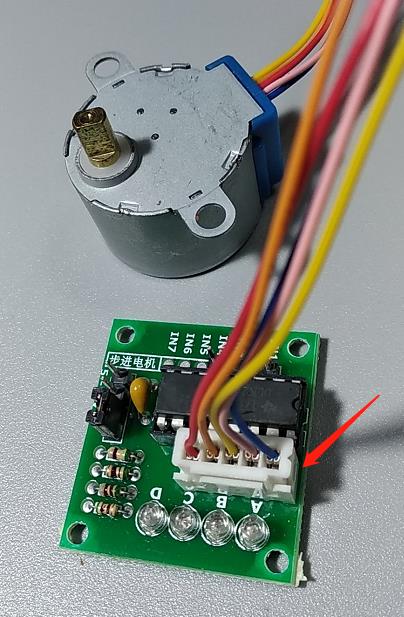
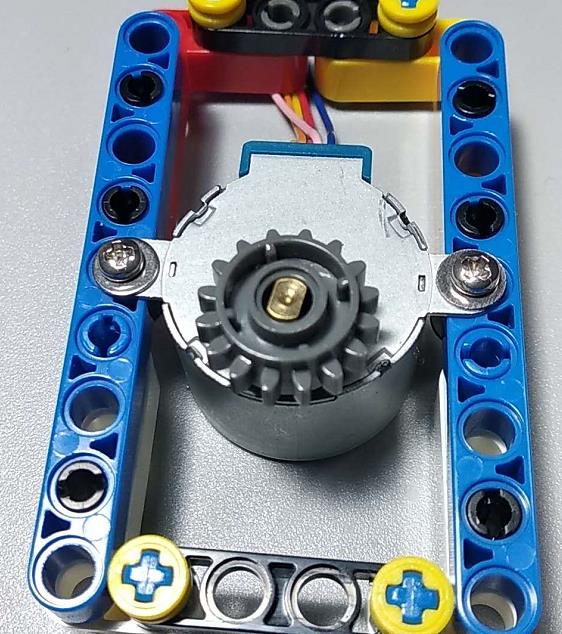
1.1 28BYJ-48步进电机

直径:28mm
电压:5V
步进角度:5.625 x 1/64
减速比:1/64
单个重:0.04KG
5线4相 可以用普通uln2003芯片驱动,也可以接成2相使用。
1.2 ULN2003步进电机驱动板
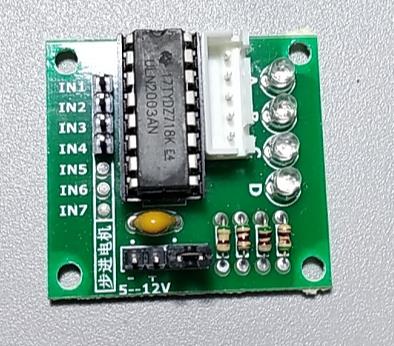
A、B、C、D发光二极管指示四相步进电机工作时的状态
配有步进电机的标准接口,使用时可直接插拨。
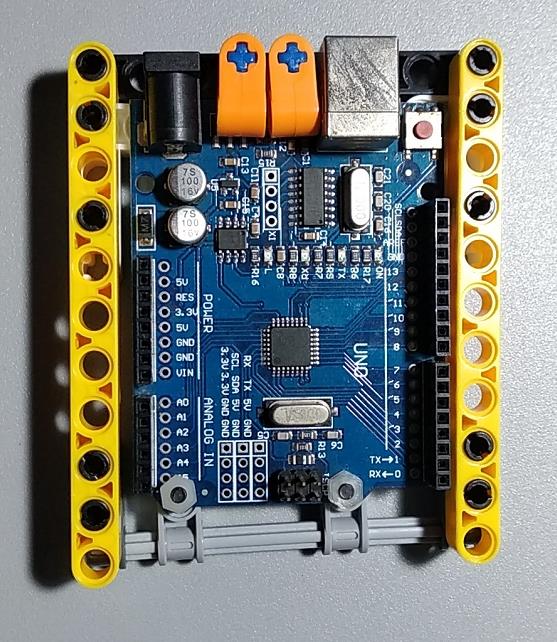
1.3 Arduino Uno
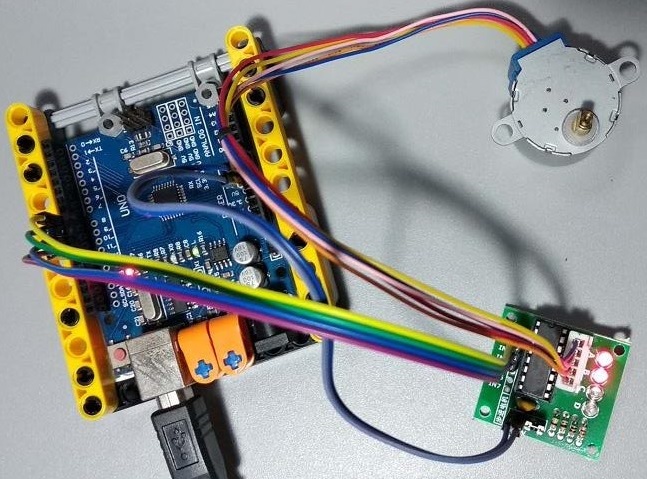
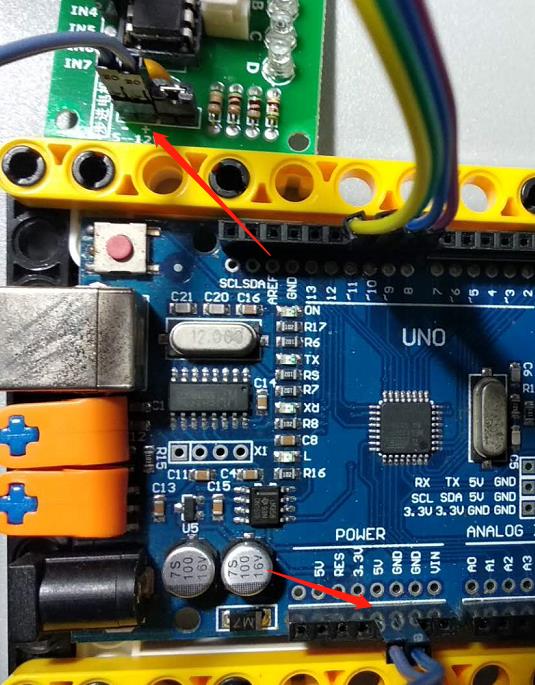
2. 连接方法

3.代码
#include<Stepper.h>
const int stepsPerRevolution = 100;// 每转一圈的步数
//初始化步进库,接口按8、10、9、11
Stepper myStepper1(stepsPerRevolution, 8, 10, 9, 11);
void setup() {
//设置旋转速度,每分钟多少步
myStepper1.setSpeed(200);
//初始化串口
Serial.begin(9600);
}
void loop() {
Serial.println("顺时针转");
myStepper1.step(2048);
delay(500);
Serial.println("逆时针转");
myStepper1.step(-2048);
delay(500);
}
参考1:https://segmentfault.com/a/1190000008018620
参考2:https://blog.csdn.net/sdlgq/article/details/50357703
参考3:https://blog.csdn.net/wuhenyouyuyouyu/article/details/51612073

{kind=link}
近期评论